When you connect to the SmartFix network, you have two overarching choices for receiving corrections: Network RTK (i-MAX) or a Single Baseline solution.
Understanding the differences between these two methods is critical for maximising your accuracy and reliability in the field.
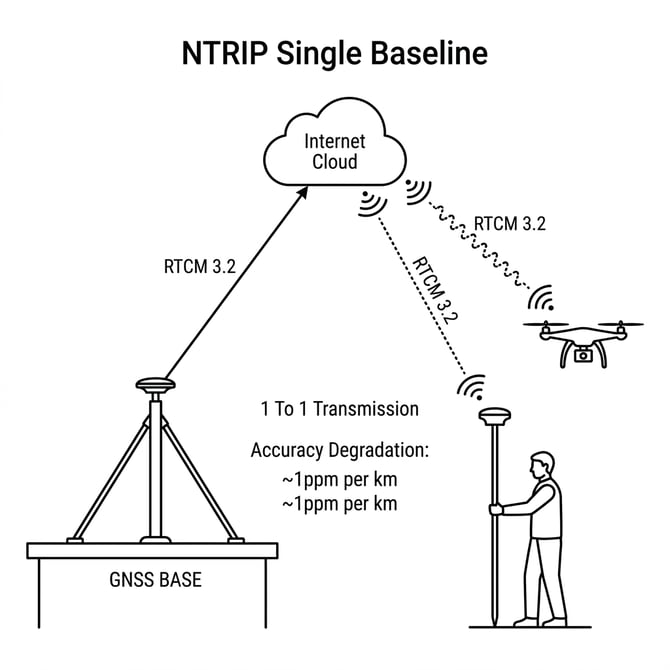
What is a Single Baseline Solution?
A Single Baseline connection ties your rover directly to one specific physical reference station (e.g., Mountpoint AUCKsingleADV4 ties you strictly to the Auckland base station). The corrections sent to your rover are calculated based entirely on the observations recorded at that single antenna.
Limitations of Single Baseline
- Distance Degradation: Typical RTK accuracy degrades by approximately 1 part per million (1ppm) for every kilometre you move away from the base station. (e.g., being 30km away adds ~30mm of error).
- Atmospheric Variance: It cannot account for localised atmospheric disturbances. If a micro-climate (like heavy cloud cover or dense ionospheric activity) is sitting between you and the base station, your rover's accuracy will suffer.
- No Redundancy: If the physical base station loses internet or experiences a power anomaly, your rover will instantly drop to an autonomous (Float) state.
NOTE: Working Range Information While you can in theory work at any range we recommend the following
Typical Working Thresholds for Single Baseline:
* Surveyors / High Precision (≤ 15mm error): approx. 10km
* Machine Control / Earthworks (≤ 30mm error): approx. 15-20km.
* Drones / Photogrammetry (≤ 50mm error): approx. 20-25km. While aerial tolerances are larger, the drone's GNSS engine will often fail to initialise a fixed solution beyond 25km.
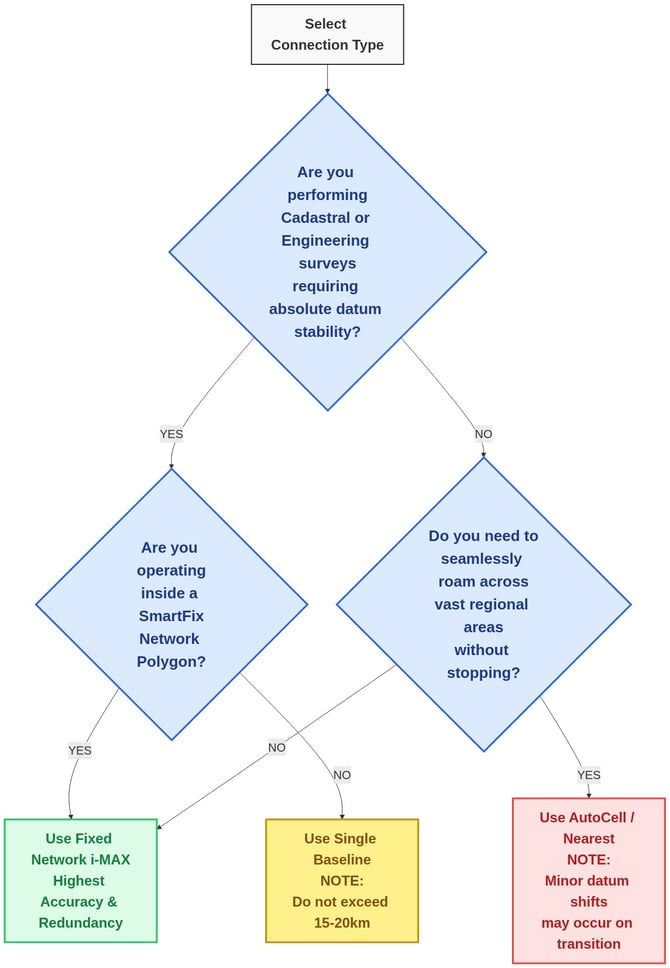
If you are working beyond these distances, transitioning to a Fixed Network Solution is highly recommended.
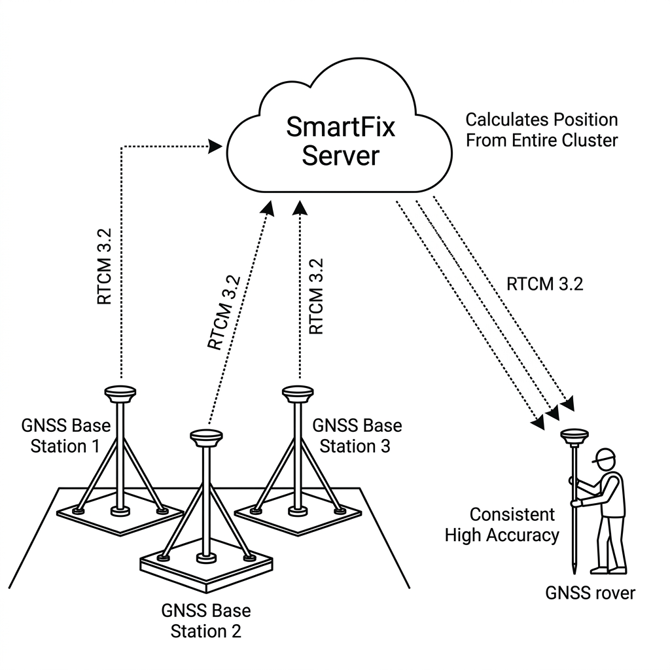
What is a Network Cluster Solution (i-MAX)?
Instead of connecting to just one station, a Network or Fixed Port (e.g., Port 4819) calculates your position using an entire cluster of surrounding reference stations simultaneously. We broadcast an i-MAX (individualized Master-Auxiliary) solution, and this must be selected as the network type on your rover. All Network (xx1x) ports broadcast i-MAX, as does AutoCell.
The Benefits of Network Corrections
-
Consistent, High Accuracy Over Vast Distances: Because the server processes data from 3 to 6 surrounding stations at once, it creates an incredibly accurate model of the atmosphere above your job site. The typical "1ppm" distance degradation is heavily mitigated mathematically. You consistently achieve maximum centimeter-level accuracy anywhere within the network polygon.
-
Intelligent Self-Healing Redundancy: If a single reference station in your cluster suddenly goes offline due to a power outage, the SmartFix server will seamlessly re-weight the algorithm using the remaining active stations. Your rover will remain actively fixed without skipping a beat.
-
Faster Initialisation Times: Because atmospheric and orbital errors are modelled dynamically and transmitted to your rover natively in RTCM 3.2 MSM format, your rover's engine can resolve ambiguities (achieve "RTK Fixed" status) significantly faster than relying on a single base, especially under challenging canopy environments.
-
Simplicity in the Field: When connecting to a regional Fixed port (e.g.,
4819for Auckland/Northland), the central server handles the heavy lifting of figuring out which physical stations are best for you. You do not need to constantly select different mountpoints as you drive across the region.
The i-MAX Transmission Architecture
When you select a Fixed network mountpoint, the SmartFix server has to package that clustered data and transmit it down to your rover over the internet. SmartFix is built entirely around the i-MAX (Individualised Master-Auxiliary) architecture.
The SmartFix server intelligently streams corrections from a primary "Master" station while seamlessly applying atmospheric error models calculated from 3 to 5 surrounding "Auxiliary" stations based on your rover's approximate location.
Because the server individualises the atmospheric model specifically for you before transmission, i-MAX is incredibly robust, securely handles fast movement over long distances without "jumping", and perfectly leverages the computing power of modern multi-constellation equipment.
NoTE: Legacy / 3rd-Party Support: While SmartFix natively broadcasts i-MAX, we also separately broadcast a VRS (Virtual Reference Station) solution. This must be selected as the network type on the rover when connecting via Port
4810(which functions similarly to an AutoCell product). This ensures continuous fallback compatibility for older or specific third-party rover fleets that rely on server-side simulated base stations.You will notice that SmartFix standard mountpoints end in
ADV4(e.g.,AUCKfixedADV4). This indicates the mountpoint leverages the RTCM 3.2 MSM4/MSM5 protocol. ModernADV4mountpoints intrinsically broadcast full GNSS (GPS, GLONASS, Galileo, and BeiDou) utilising the modern i-MAX standard.
AutoCell and Nearest Site Routing
The Leica GNSS Spider engine supports automated mountpoint routing based on the NMEA GGA string continuously transmitted back to the network by your rover.
- Nearest: Automatically provisions the closest single reference station.
- AutoCell: Automatically provisions the optimal MAC Network Master Station and supporting cell based on your active location.
NOTE: Cadastral & Engineering Note: The use of 'Nearest' or 'AutoCell' mountpoints is generally not recommended in New Zealand. If the network automatically transitions your connection to a different physical Master Station mid-survey, you will experience an unpredicted datum shift. Positioning professionals are strongly advised to intentionally select and maintain a Fixed i-MAX or Single Baseline mountpoint for the entirety of their task.
Solution Choice Decision Tree
Quick Reference: Pros & Cons Matrix
| Feature | Single Baseline | Network (Fixed / i-MAX) | Dynamic (AutoCell / Nearest) |
|---|---|---|---|
| Best For... | Drones, static localised sites, or operation on the extreme fringes of coverage where a network polygon does not exist. | Modern rovers, continuous mobile operations, high-speed RTK traversal, and large infrastructure corridors. | General GIS, Agriculture, and broad-scale drone flight where absolute datum consistency is not critical. |
| Max Threshold | 15km (Survey) 25km (Machine Control) 25km (Drones) |
Network Bounded (Effectively unlimited anywhere inside the active SmartFix station polygon) | AutoCell: Unlimited Roaming Nearest: Same limits as Single Baseline |
| Pros | - Extremely simple to establish a connection - Works anywhere a single physical base is online |
- Distance degradation (~1ppm) heavily mitigated - 100% station redundancy if one base fails - Seamless transition during high-speed travel |
- True "set and forget" operation - Automatically transitions across the entire country |
| Cons | - Accuracy degrades 1ppm per km - 0% redundancy if the single base unplugs - Vulnerable to localised weather cells |
- Requires modern rover hardware capable of RTCM 3.2 MSM decoding (Standard on most modern equipment) | - Causes sudden datum shifts when transitioning between bases mid-survey - Highly discouraged for Cadastral use - Nearest Only: Still suffers from 1ppm distance degradation if the closest base is far away |
TIP: Which should I choose? Firstly, check to see what your nearest physical station is. Always select the physically closest station; if the station provides a Fixed network solution use this, if not use a Single baseline solution.
* Network / Fixed: Use a Fixed Network mountpoint for Surveying/Engineering whenever possible. It provides superior reliability and accuracy.
* Single Baseline: In some areas a Single Baseline is the only option and it is also recommended if you are operating on the extreme fringes of the country outside the bounds of a network polygon. Be highly aware that long distances will inherently degrade your accuracy (~1ppm per kilometre) due to baseline error.
* AutoCell / Nearest: You should only use dynamic routing if you are performing broad-scale operations (like Agriculture, GIS, or long-range Drone flights) where maintaining an absolute origin datum is not critical.
Note: Once connected to a Station, the Rover will NOT hop to the next station until you disconnect and reconnect to the stream. If the stream goes down while you are connected, you will need to reconnect to get the next nearest station.