This guide assumes that a radio RTK Profile and suitable Working Style are already configured.
Turn on the CS20 controller and GS reference antenna
Create a job using the correct coordinate system and height datum to match your control
From the apps carousel, select Switch to Base
Initial Configuration from scratch (first time use)
Select Settings – Connections – Connect to GS Base
- Select the correct Sensor
- Connect using Bluetooth
- Search (F4)
- Highlight the correct antenna – OK – OK
- If a message appears “
- After a few seconds the antenna is connected
- Select Settings – Connections – All other Connections
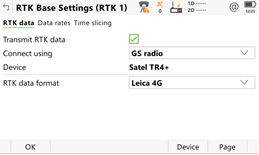
- Highlight Base RTK1 – EDIT
- Tick the box to Transmit RTK data
- Connect Using – GS Radio
- Device (F4)
Select the Satel radio modem from the list – OK
If a message appears saying the radio is already in use, create a New (F2) radio and append the Name with ‘base’, then Store and OK
- RTK Data Format – Leica 4G (or as required to match your rover) – OK
- Select Control (F4)
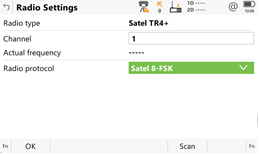
Choose the protocol – Satel 8-FSK (or as required to match your rover)
OK – OK
Settings – GS Base – Satellite Tracking
-
- Tick all the boxes – OK
Starting the base
Base Setup - Over Known Point – where the base coordinate is known
Select the base antenna type-
- For GSxx Tripod setups, measure height to the white line using the height hook. For other setups (eg GSxx Pole), measure a vertical distance to the lowest point on the antenna collar
-
- For GSxx Tripod setups, measure height to the white line using the height hook. For other setups, measure a vertical distance to the lowest point on the antenna collar
Enter a base point ID – Next
The base is started - Select Rover to return to the Home page